Unbemanntes Design
2024-06-27 16:37:56
Erstellen Sie grundlegende Drohnenformen mit Linien und Kreisen (stellen Sie sicher, dass die Einheiten in Millimetern sind). Zusätzlich wurden symmetrische Linien hinzugefügt, um Komponenten perfekt ausbalanciert zu platzieren, wodurch die Komplexität des Drohnenalgorithmus reduziert und stabil wird. Fügen Sie gebogene Kanten hinzu, um es haltbarer zu machen. Die Größe der Drohne wird basierend auf dem Propeller bestimmt, und es gibt breite Abmessungen zur Auswahl (40mm, 55mm, 65mm), die für den 8520-Motor am besten geeignet sind.
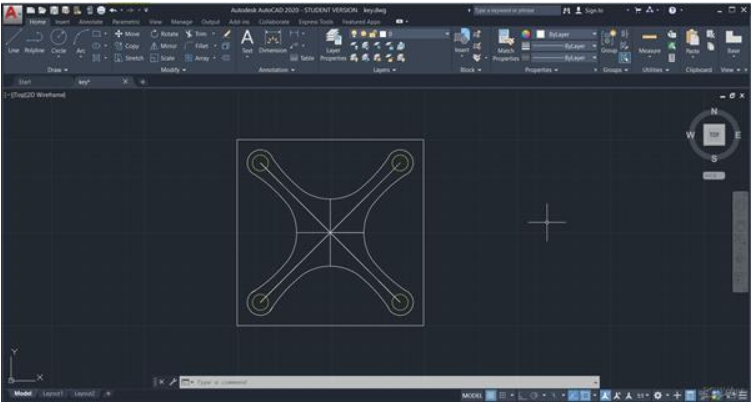
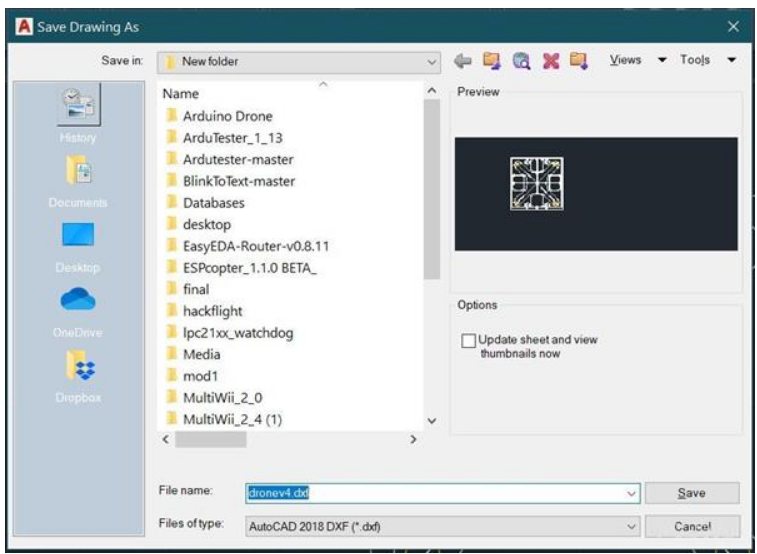
Nachdem das Design abgeschlossen ist, fügen Sie ein äußeres Quadrat von 10x10 Zentimetern hinzu und speichern Sie das Diagramm im dxf-Format.
EASYEDAs Schaltungsdesign:
Beginnen Sie jetzt mit der Entwicklung von Schaltungen in EASYEDA.
Erstellen Sie ein neues Projekt und zeichnen Sie einen Schaltplan.
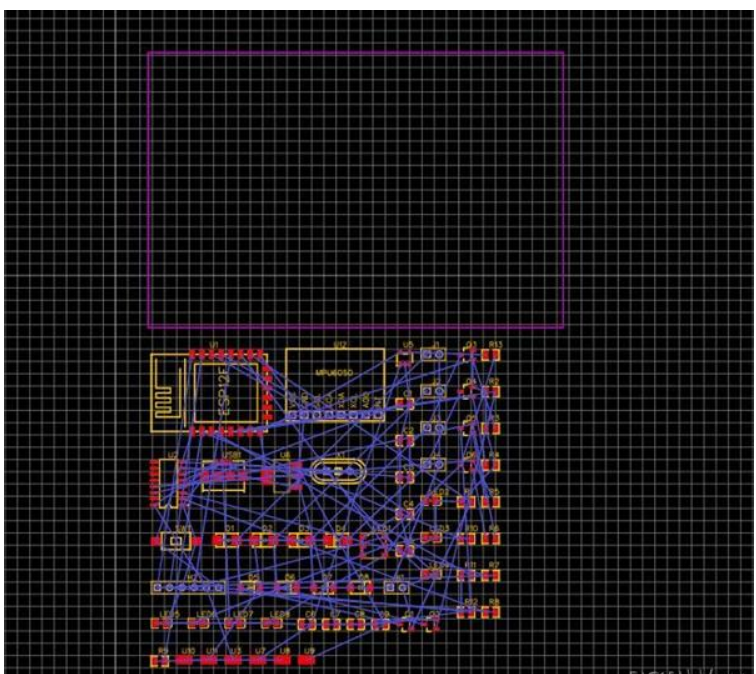
Verwenden Sie Netzwerkports, um den Schaltplan sauber und ordentlich aussehen zu lassen.

Nachdem der Schaltplan fertig ist, klicken Sie auf "Design" ->Schaltplan in PCB konvertieren.
Erlauben Sie die DRC-Inspektion, um den Schaltplan zu überprüfen.
Stellen Sie sicher, dass keine Fehler oder Warnungen vorliegen.
Dxf-Datei in EASYEDA importieren:
Nach dem Erstellen der Leiterplatte können wir nun die Diagramme aus AutoCAD importieren.

Stellen Sie sicher, dass Sie den Ebenentyp als "Board Outline" und "Strichbreite" als 0,245 Millimeter auswählen.
Aktivieren Sie das Kontrollkästchen Kreis in HOLE konvertieren auf der BoardOutLine-Ebene, wodurch Löcher für die Motorinstallation erstellt werden.
Beginnen Sie damit, die Komponenten so symmetrisch wie möglich anzuordnen.
Wenn Sie den MOSFET in der Nähe des Motors halten, wird der MOSFET während des Propellerflugs aus einem extremen Zustand abgekühlt.
Versuchen Sie, die IMU so weit wie möglich in der Mitte zu halten, was die Drohne stabilisiert und die Komplexität des Algorithmus reduziert.
Das Hinzufügen von Siebdruckpfeilmarkierungen, die die Vorderseite der Drohne darstellen, wäre hilfreich während des Fluges.
Fügen Sie eine kreisförmige Pfeilmarkierung hinzu, die die Drehung des Motors anzeigt, was bei der Befestigung des Motors hilfreich ist.
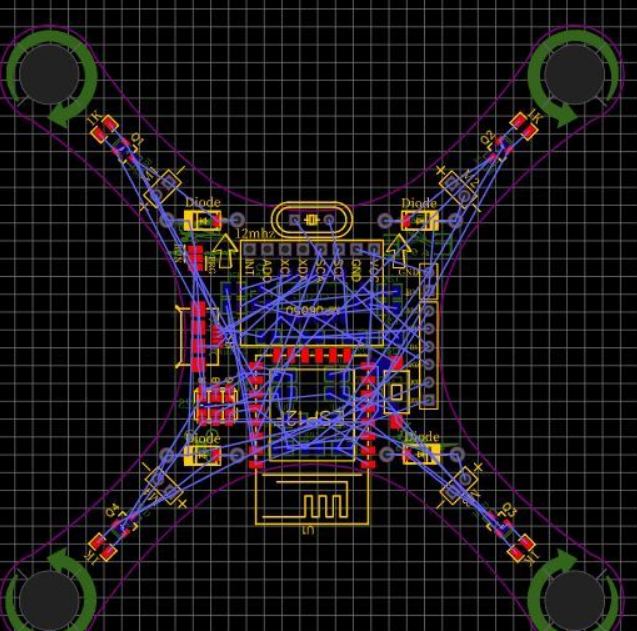
Symmetrielinien löschen.
Verwenden Sie nun AutoRouter oder routen Sie alle Spuren manuell.
Die empfohlene Route ist manuell.
Vergrößern Sie die Breite des Netzkabels.
Jeder Motor kann bis zu 2A Strom verbrauchen, und wenn die Spur 0,25 Millimeter beträgt, brennt die Spur aus. Daher ist die empfohlene Breite für das Motorstromkabel (0,4 bis 1 Millimeter).

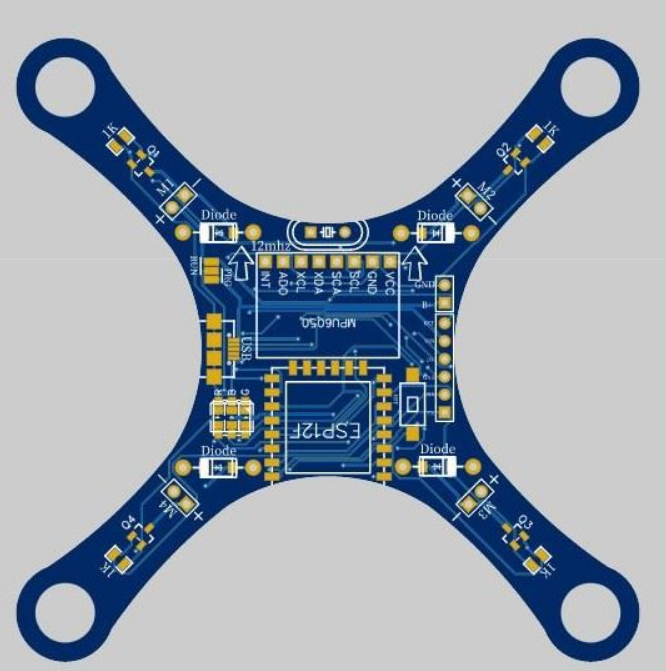
Verwenden Sie die 2D- oder 3D-Ansicht, um die endgültige Leiterplatte anzuzeigen.
Das Hinzufügen aller Terminalmarkierungen erfolgt im Siebdruck, um versehentliche Umkehrpolaritätsverbindungen zu verhindern
Sobald Sie mit der endgültigen Ansicht zufrieden sind, exportieren Sie die Gerber-Datei (Datei ->PCB Fabric File generieren (Gerber)
Stellen Sie JA für die DRC-Inspektion bereit, die sicherstellt, dass das PCB-Design fehlerfrei ist.
Laden Sie nun die Gerber-Datei auf PCBWay hoch und wählen Sie eine Dicke von 1,2mm aus.
Ich habe die Dicke der Leiterplatte, wie 1mm, 1.2mm, 1.6mm getestet.
1.6mm ist Standard, aber es fügt etwas Gewicht zur Drohne hinzu. 1mm und weniger fügen mehr Flexibilität zur Drohne hinzu und machen sie nutzlos. 1.2mm ist die beste Wahl, bietet weniger Flexibilität, leichteres Gewicht und gute Rahmenstärke.
Während der Tests vor Ort erlebte die Drohne viele Kollisionen, und die 1,2mm Platine überlebte mit nur einigen Kratzern um die Arme der Drohne.